 Forschungsbereich »Gesundheitstechnologien und -prozesse«
Forschungsbereich »Gesundheitstechnologien und -prozesse«
STACIE
STACIE – Smart Assistance for Catheter-Based Interventions
Stents setzen, Aneurysma Coiling oder Mechanische Thrombektomien sind die Goldstandards für die Behandlung der großen Volkskrankheiten Schlaganfall und Herzinfarkt. Diese Eingriffe haben gemein, dass Arterien punktiert, also mit einer Nadel angestochen werden, um durch diesen Zugang dünne Instrumente bis zur erkrankten Arterie am Herz oder im Gehirn zu navigieren. Ärztinnen und Ärzte sprechen bei diesen Instrumenten von Führungsdrähten und Kathetern. Häufige Punktionsstellen für Schlaganfall- und Herzinfarktbehandlungen sind die Leistenarterien oder die Speichenarterien am Unterarm. Die Wege, die bei einem solchen Eingriff durch die Blutgefäße zurückgelegt werden, liegen im Bereich von 1 - 1,5 m. Windungen und Abzweigungen der Gefäße kommen erschwerend hinzu und machen die erfolgreiche Navigation der Instrumente zu einer schwierigen Aufgabe, die langes Training erfordert.
Die Fraunhofer IPA Abteilung »Klinische Gesundheitstechnologien« in Mannheim forscht an der autonomen Navigation dieser Katheter und Führungsdrähte. Mit Methoden der Künstlichen Intelligenz, insbesondere des Deep Reinforcement Learning, wird einem neuronalen Netz beigebracht, Katheter und Führungsdraht im Gefäßsystem zu navigieren. Basierend auf dem Röntgenbild wird eine automatische Steuerung für kommerzielle Kathetermanipulatoren entwickelt. Dabei entwickelt das Fraunhofer IPA die Steuerung und das Fraunhofer MEVIS die Bildverarbeitung der Röntgenbilder.
Die Steuerung verwendet neuronale Netze, um die komplexen Zusammenhänge der Bewegung an der Katheterbasis und Katheterspitze in Echtzeit zu berücksichtigen. Die Schwierigkeit bei der Entwicklung liegt darin, dass klassische Steuerungs- und Regelungstechnik nicht anwendbar sind. Katheter und Führungsdrähte sind bis zu zwei Meter lange Plastikschläuche und Drähte, die um viele Windungen im Körper geführt werden. Um die Gefäße nicht zu verletzen sind diese zudem extra weich entwickelt. Hierdurch unterscheiden sie sich von einem konventionellen Roboter, der möglichst steif ist und eine begrenzte Anzahl räumlich definierter Gelenke besitzt. Diese Eigenschaften konventioneller Roboter ermöglicht es, analytisch exakt ihre Kinematik zu berechnen. Bei Kathetern ist diese analytische Berechnung auf der Basis eines Modells nicht möglich. Daher werden von uns modellfreie Steuerungsverfahren des Deep Reinforcement Learning angewendet.
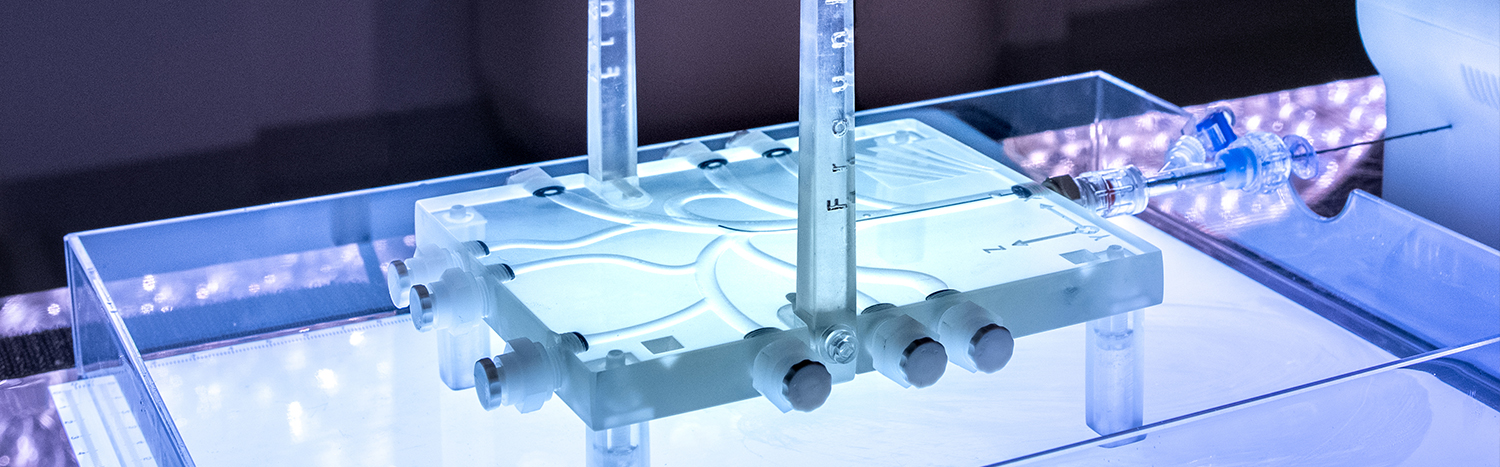
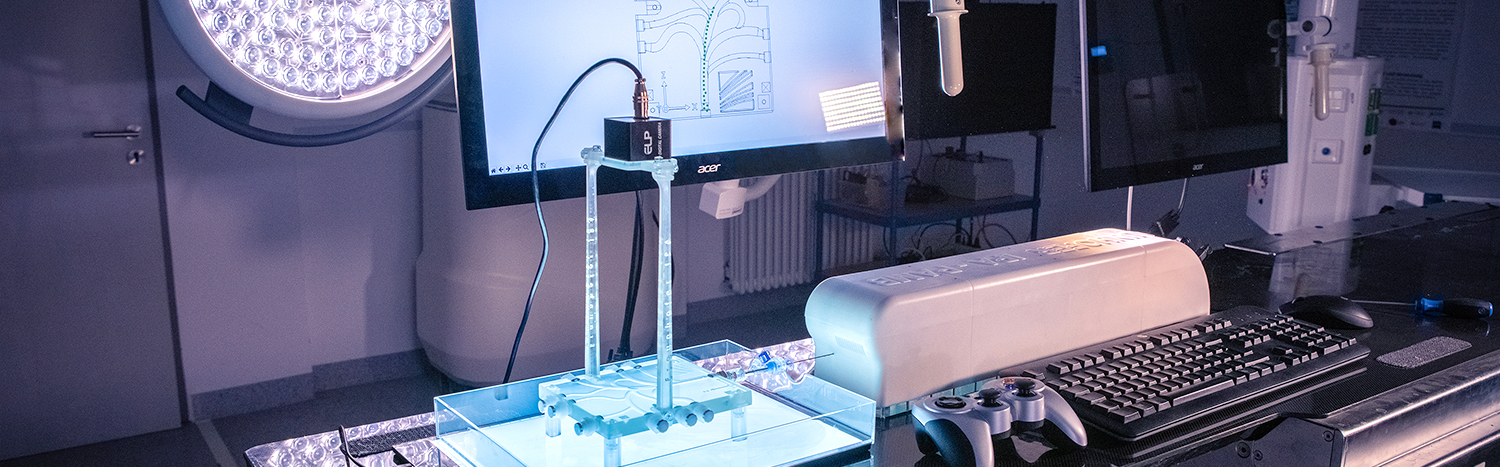
In Versuchen an unserem Prüfstand ist es gelungen, einen Führungsdraht autonom durch ein Gefäßphantom zu navigieren. Die Steuerung wurde dabei ausschließlich in einer Simulationsumgebung trainiert und konnte problemlos auf den Prüfstand übertragen werden. Aktuelle Forschungsschwerpunkte sind die Verwendung von Führungsdraht und Katheter, die nahtlose Anpassung an beliebige Geometrien und die Auswahl der richtigen Katheter- und Führungsdrahtkombination für den individuellen Gefäßbaum des Patienten. In zukünftigen Forschungs- und Entwicklungsprojekten soll zudem die Praxistauglichkeit unseres Steuerungsverfahrens weiter verbessert werden.

Diese Arbeiten wurden im Rahmen des Fraunhofer WISA Programms gefördert.