 Research area »Healthcare Technologies and Processes«
Research area »Healthcare Technologies and Processes«
STACIE
STACIE - Smart Assistance for Catheter-Based Interventions
Stent placement, aneurysm coiling or mechanical thrombectomies are the gold standards for the treatment of the major widespread diseases stroke and heart attack. These interventions have in common that arteries are punctured, in order to navigate thin instruments through this access to the diseased artery in the heart or brain. Doctors refer to these instruments as guidewires and catheters. Common puncture sites for stroke and heart attack treatment are the femural arteries or the radial arteries on the forearm. The distances covered by the blood vessels during such an operation range from 1 - 1.5 m. Coils and branches of the vessels are an additional complication and make successful navigation of the instruments a difficult task that requires long training.
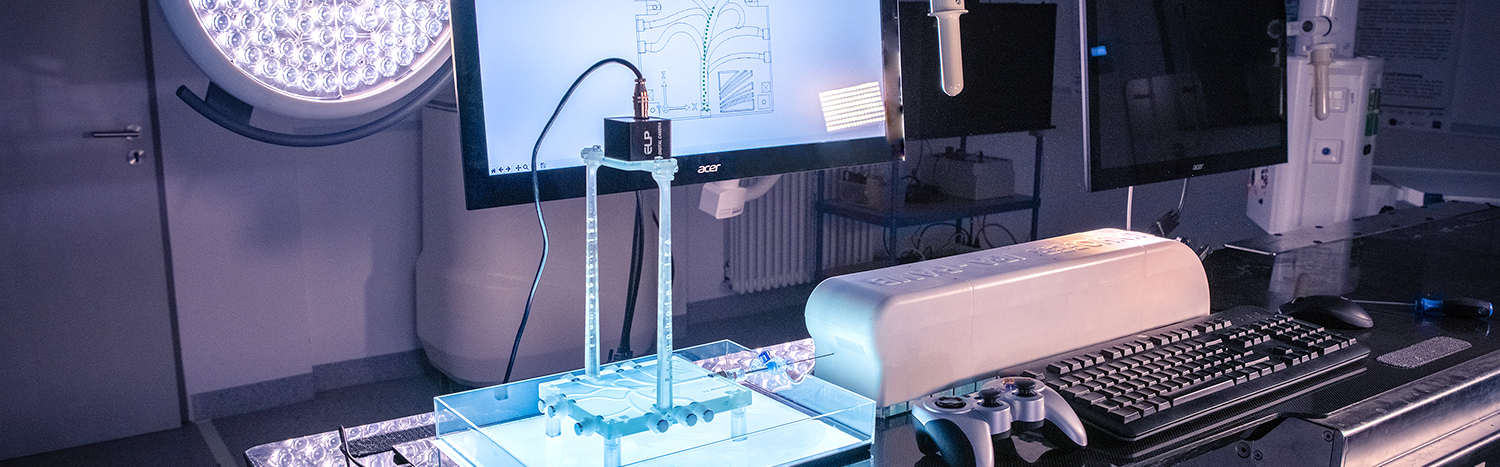
The Fraunhofer IPA department »Clinical Health Technologies« in Mannheim is researching the autonomous navigation of these catheters and guide wires. Using methods of artificial intelligence, in particular deep reinforcement learning, a neural network is taught to navigate catheters and guide wires in the vascular system. Based on the X-ray image, an automatic control system for commercial catheter manipulators is being developed. Fraunhofer IPA is developing the control system and Fraunhofer MEVIS the image processing of the X-ray images.
The controller uses neural networks to take into account the complex interrelationships of movement at the catheter base and catheter tip in real time. The difficulty in the development is that classical control and regulation technology is not applicable. Catheters and guide wires are plastic tubes up to two meters long and wires that are guided around many turns in the body. In order not to damage the vessels, they are also developed extra soft. This distinguishes them from a conventional robot, which is as rigid as possible and has a limited number of spatially defined joints. These properties of conventional robots allow their kinematics to be calculated analytically with great accuracy. With catheters, this analytical calculation is not possible on the basis of a model. Therefore we apply model-free control methods of Deep Reinforcement Learning.
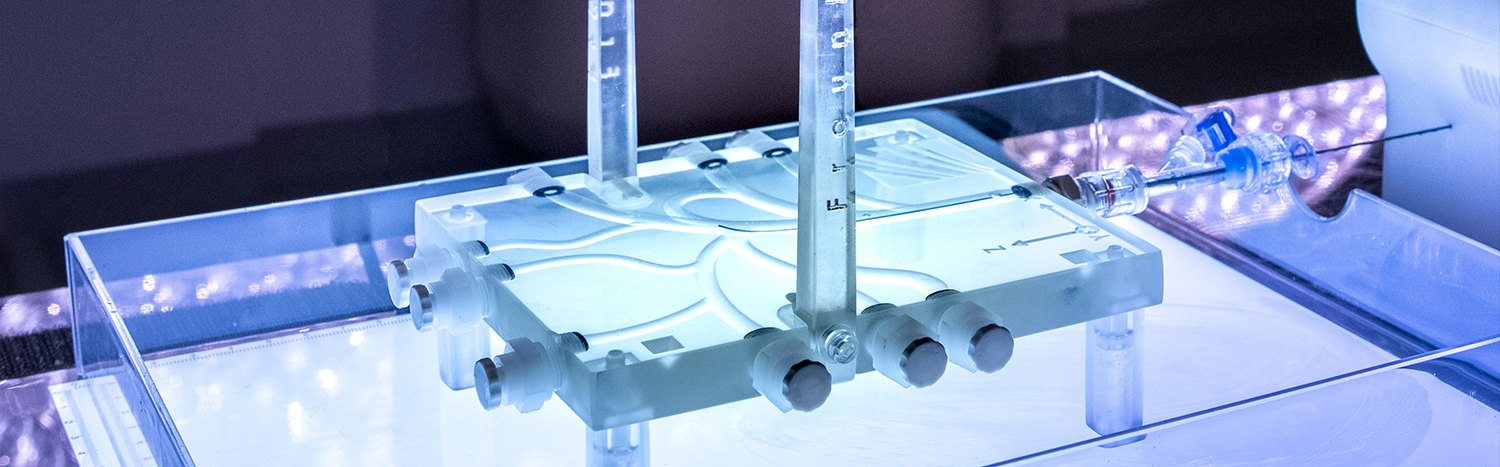
In experiments on our test bench we succeeded in navigating a guide wire autonomously through a vascular phantom. The control was trained exclusively in a simulation environment and could be transferred to the test bench without any problems. Current research focuses on the use of guide wire and catheter, the seamless adaptation to any geometry and the selection of the right catheter and guide wire combination for the patient's individual vascular tree. In future research and development projects, we also intend to further improve the practicability of our control procedure.

This work was funded within the Fraunhofer WISA program.