 Forschungsbereich »Gesundheitstechnologien und -prozesse«
Forschungsbereich »Gesundheitstechnologien und -prozesse«
SPIRITS
SPIRITS - medizinischer Telemanipulator aus dem 3D-Drucker
Die bildgestützte minimalinvasive Chirurgie steht am Beginn einer neuen Ära. Durch die immer engere Verbindung von chirurgischen Eingriffen und bildgebenden Verfahren entstehen hybride minimalinvasive Techniken, die verbesserte Eingriffe, weniger postoperative Komplikationen und eine kostengünstigere Gesundheitsversorgung versprechen.
Unterstützende Robotersysteme sind bereits heute Standard bei bestimmten chirurgischen Eingriffen. In der interventionellen Radiologie sind hingegen noch keine Systeme verbreitet. Zwar existiert eine begrenzte Zahl von Ansätzen, diesen fehlt es jedoch an Flexibilität in Bezug auf vorhandene Bildgebungsmodalitäten, sie bieten nicht die notwendige Sicherheit und Bedienungsfreundlichkeit für die Ärztinnen und Ärzte im OP.
Diesem drängenden Problem nimmt sich das Projekt SPIRITS, ein Kooperationsprojekt mit den Partnern Universitätsmedizin Mannheim, ICube-INSA Strasbourg, Hochschule Furtwangen, Fachhochschule Nordwestschweiz und Ecole polytechnique fédérale de Lausanne, an.

Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacyNeue operative Eingriffe erfordern spezifische technische Lösungen
Der Einsatz robotischer Systeme in Verbindung mit verschiedenen bildgebenden Verfahren stellt sehr hohe Anforderungen an die mechanischen Komponenten: Das System muss sehr kompakt sein, um beispielsweise Kollisionen mit einem C-Bogen zu vermeiden oder das Einfahren in die Röhre eines CT oder MRT zu ermöglichen. Enge Grenzen sind weiterhin bei der Auswahl der Werkstoffe gesetzt: Metallische Strukturen würden Bildartefakte erzeugen, der Einsatz konventioneller Motoren im Magnetfeld eines MRT ist gänzlich ausgeschlossen.
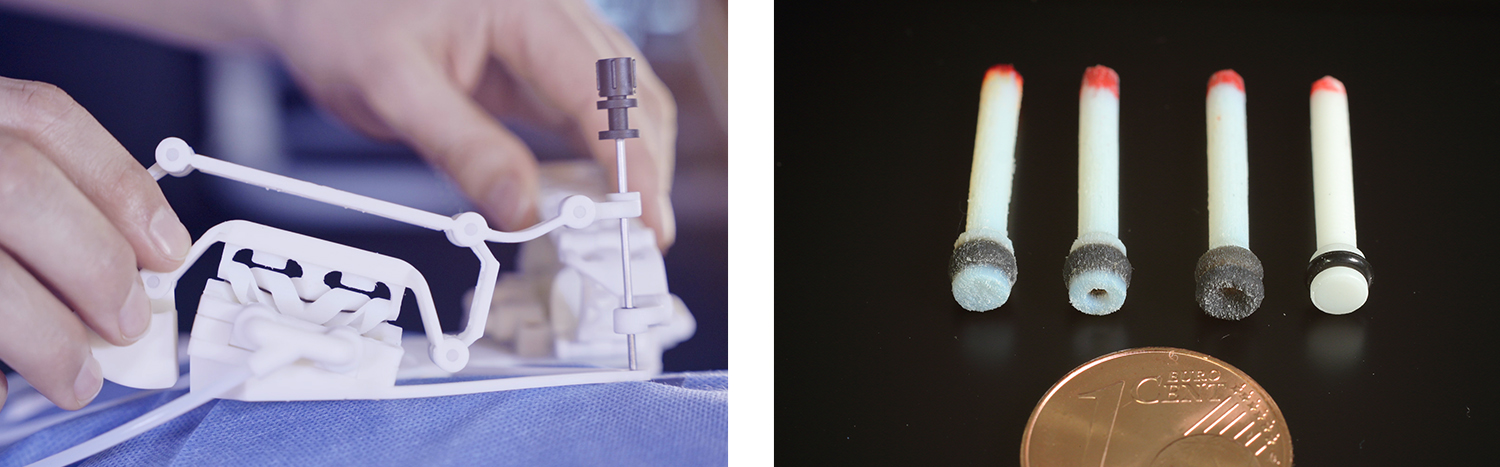
Im Projekt SPIRITS kommt nahezu der gesamte Manipulator aus dem 3D-Drucker – als Kombination aus starren und flexiblen Polymeren. Hierzu hat das Projektteam am Fraunhofer IPA und der Universitätsmedizin Mannheim eine spezielle Aktorik entwickelt: Hydraulische Aktoren, die durch Polymer-3D-Druck hergestellt und mit Wasser betrieben werden. Die gesamte Steuerung der Aktoren befindet sich dabei im Kontrollraum. Der über Schläuche verbundene Manipulator kann jedoch einige Meter entfernt sein, so dass sich alle nicht-kompatiblen Komponenten außerhalb des Interventionsraums befinden.

Erschließung neuer Einsatzgebiete durch Additive Fertigung
Die Forschungsaktivitäten im Projekt Spirits beinhalten die Erforschung neuartiger 3D-Druck-Materialen im Hinblick auf ihre Kompatibilität mit medizinischen Bildgebungsmodalitäten sowie deren Eignung für Medizinroboter und neuartige Aktoren. Im Rahmen des Projekts wurde ein Prototyp mit zwei Freiheitsgraden additiv hergestellt. Dieses System ermöglicht die präzise Positionierung einer Nadel auch innerhalb der Röhre eines CTs oder MRTs, ohne dass sich die behandelnden Ärztinnnen und Ärzte dazu im Interventionsraum befinden müssen.

Das Projekt Spirits wird durch das Programm INTERREG Oberrhein des Europäischen Fonds für regionale Entwicklung EFRE unterstützt.